
































西門子plc PID編程控制及程序調試
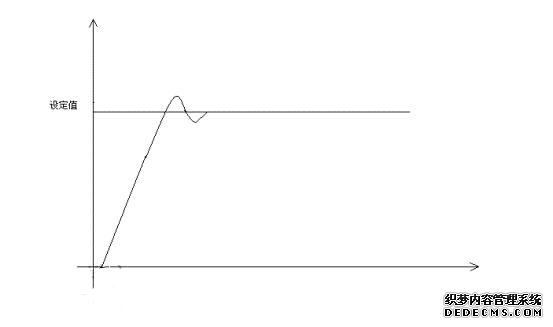
例如,如果在控件中使用西門子plc PI控制,如果存在靜態錯誤,則輸出將不會達到設置值。此時,積分項的累積誤差值將變得越來越大。當乘以Ki時,將輸出該累積值。權重的比例越大,輸出u(t)越大,最后消除靜態誤差的目標越大。 1.首先將I值設置為0,并將P值設置得相對較大。當發生穩定振蕩時,我們減小P值,直到P值不振蕩或振蕩很小(該術語稱為臨界振蕩狀態)。在這種情況下,我們還可以在一些P值的基礎上添加更多。 2.增加I值,直到輸出達到設定值。 標準PID公式可能導致系統中的過沖,如溫度控制等響應慢,因為在加熱開始后輸出被調整到最大值(例如,固態繼電器的PWM輸出已經為100)。 %是開放的)但溫度仍然只是緩慢上升,那么積分項將很快增加。當溫度達到設定值時,即使比例項輸出為0,積分項仍然是積累值高且輸出大,導致溫度過沖。 在Devison的V80中,通過弱化積分法的改進方法很好地解決了這個問題,使得積分項在輸出完全打開時停止積分,這減小了積分對大延遲系統的影響。
西門子plc PID控制: 由于PI系統中I的存在會影響整個plc控制系統的響應速度,為了解決這個問題,我們在控制中增加了D微分項,而微分項主要用于解決系統的響應速度問題,其完整公式如下: u(t)=Kp * e(t)+ Ki∑ e(t)+ Kd [e(t)– e(t-1)] + u0模擬電路中的微分常數與特征頻率有關然而,數字離散PID中的微分項實際上存在一些問題,因為它只計算兩個誤差之間的差異,而實際的應擴大模擬PID或用戶所需的理想微分公式。只有拓寬的D值才能真正達到良好的效果。導數項在減少plc控制系統中的過沖和減少振蕩方面起作用,但由于差分項本身對干擾很敏感,因此使用導數項是明智的。
在西門子plc PID的調試過程中,我們應注意以下步驟:
1.關閉I和D,增加P使其振蕩; 2.減少P,找到臨界振蕩點; 3.增加I以達到目標值; 4.重新上電,看過沖,振蕩和穩定時間是否符合要求; 5.適當增加一些過沖和振蕩的微分項; 6.請注意,所有調試都應在最大競爭下進行調試。確保調試結果在整個工作范圍內有效;位置PID與增量PID:我們上面提到的PID公式是位置PID,也稱為全PID,最常用于溫度控制,閥門控制和泵控制。另一個西門子plc PID公式稱為增量PID。公式如下:△u(t)=u(t)– u(t-1)這在運動控制中最常用,其輸出是兩次PID運算的結果。可以以這種方式使用伺服電動機的差異,一般步進或位置控制。
總結:以上就是小編為大家介紹的西門子plc PID編程控制及程序調試,如果大家有任何這方面的需求,歡迎大家咨詢容感電氣,我們將給您最真誠的服務。
- 上一篇:西門子plcET200SP模塊介紹
- 下一篇:西門子plc控制器PID運算及控制介紹
標題:西門子plc PID編程控制及程序調試 地址:http://www.511997.cn/hangye/3147.html











