
































西門子plc控制器PID運算及控制介紹
西門子plc的工作流程 1,系統初始化:一般小型PLC系統初始化主要是初始化,設置,查找擴展模塊等; 2.掃描輸入:掃描IO輸入信號; 3.執行邏輯:根據用戶西門子plc程序執行邏輯; 4.內務管理:執行PLC診斷,維護等系統程序; 5.掃描輸出:輸出邏輯執行結果; 6.通信管理:通信服務程序,響應西門子plc編程軟件和其他通信任務。
西門子plc運行方式: 從上面可以看出,PLC的操作是循環掃描操作模式。事實上,西門子plc還有三種掃描模式:定時掃描和中斷掃描。 循環掃描:PLC按上圖執行; 定時掃描:西門子plc根據用戶設置的時間進行掃描,例如50ms掃描。使用此掃描模式,用戶需要確保可以在設定的時間內掃描用戶程序。通用PLC使用定時器中斷和子程序來實現這一點。功能(在這種情況下,它與中斷掃描沒有區別),但IO掃描存在一些細微差別,并且可能使用功能塊UpData_IO立即刷新IO。
PID——溫控、變頻 PID(比例,積分和微分)是閉環控制中最常用的算法。它廣泛應用于溫度控制,水泵,張力,伺服閥和操作控制等行業,但由于每個應用的目標特點。不同的是,這需要調試工程師了解PID的控制原理,以便我們能夠很好地應用PID。
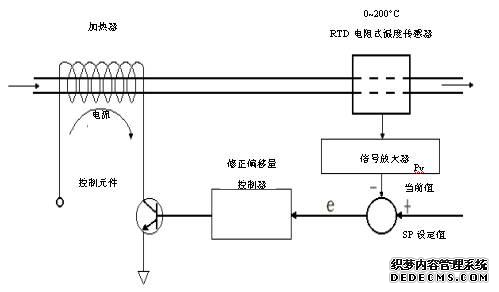
PID原理: PID由三部分組成:比例,差分和積分。在實踐中,僅使用其中的一個或兩個,例如P,PI,PD,PID等。另一方面,如果受控對象由于設定值,負載或源而受到波動,我們應該使用閉環控制。下圖是溫度控制的示意圖:
西門子plc PID執行周期
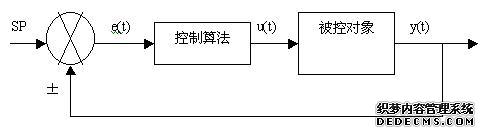
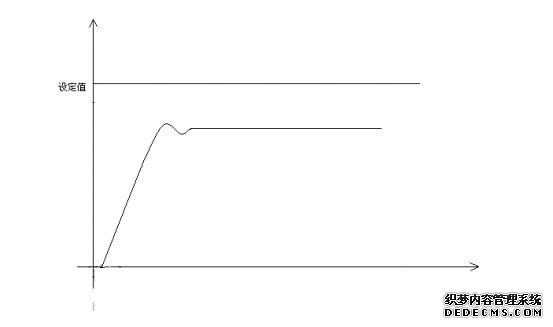
比例控制: 比例控制是最基本的控制方式。這也是最適合人們感知的控制。例如,我們控制加熱器的恒溫99度。開始加熱時,它遠離目標溫度。我們通常會增加加熱溫度以使溫度快速升高,當溫度超過99度時,我們關閉輸出。通常我們使用這樣的功能。 e(t)=SP– Y(T); u(t)=e(t)* P. SP——設定值 e(t)——錯誤值 Y(t)的——反饋價值 u(t)——輸出值 P——比例系數 滯后不是很大的控制對象可以通過比例控制方法滿足控制要求,但許多受控對象具有滯后。 例如,如果設定溫度為200度,如果溫度設定為200度,如果P選擇相對較大,當溫度達到200度并且輸出為0時,將會有向上爬升。例如,上升到230度。當溫度超過200度時,它開始回落。即使輸出開始升溫,溫度仍然會下降到一定溫度,然后再回落到170度。最后,整個系統將在一定范圍內穩定并振蕩。許多傳統的家用空調我們經常發現家用空調總是間歇性地工作。當我們開始冷卻時,我們通常會感覺越來越多。冷,當空調停止時,它會感覺到溫度越來越高,它采用比例控制 比率值太小的控制效果圖:
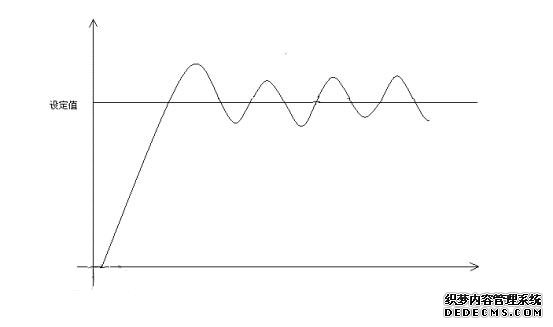
如果比率太小,反饋值將永遠不會達到設定值(靜態誤差)并達到平衡(如果加熱,則散熱和P * e(t)加熱達到平衡) 當刻度值太大時控制效果圖:
總結:以上就是小編為大家介紹的西門子plc控制器PID運算及控制介紹,如果大家有任何這方面的需求,歡迎大家咨詢容感電氣,我們將給您最真誠的服務。
標題:西門子plc控制器PID運算及控制介紹 地址:http://www.511997.cn/hangye/3149.html










